🏆 Winner: Best Overall / Most Impressive Project
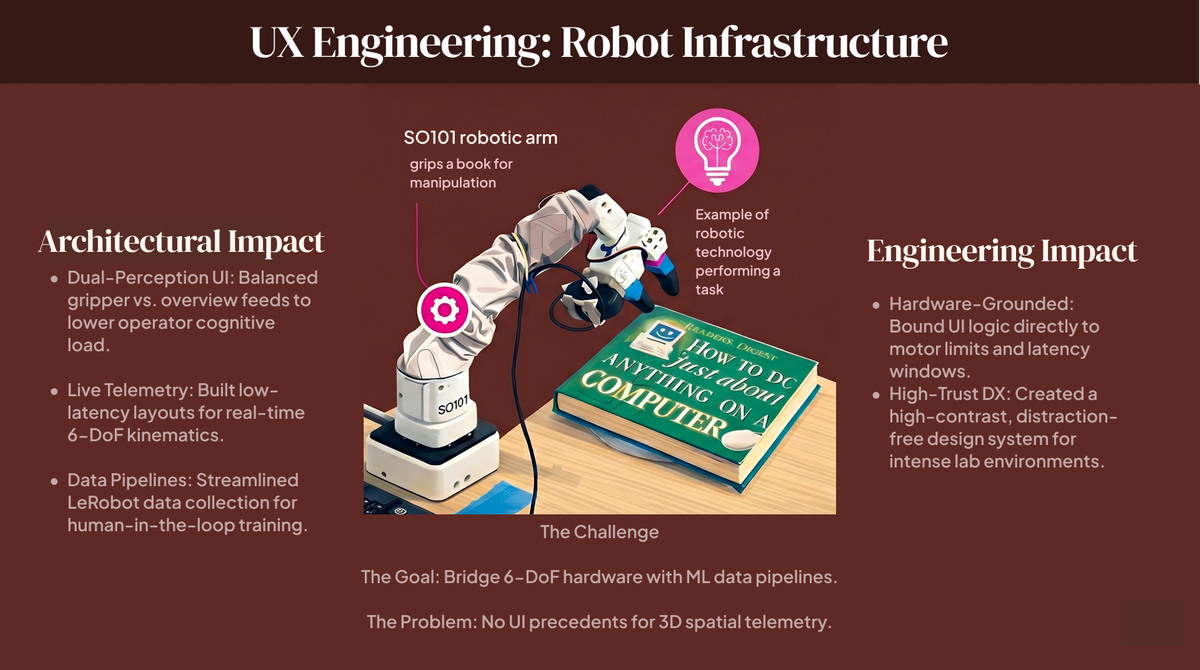
Physical AI - Reading Robot
What is a useful but not proven thing a robot arm can do utilizing physical AI?
The Problem
How might we create a screen-free, highly engaging storytelling experience that makes reading more accessible and interactive using physical AI?
The Solution
- • GitHub
- • Antigravity IDE
- • SO-101 Robotic Arm (Solo-CLI)
- • Claude Vision API
- • ElevenLabs Audio
Design Process & Strategy
This or That?
There were a bunch of robots to choose from at the hackathon including a humanoid robot that we really wanted to play with however for purposes we decided that the SO-101 Robotic arm was better. Why? Because it was more easily approachable by people and because the code would be easier to integrate into an arm than the full humanoid robot.
Define User Interaction
Mapped out how a user intuitively approaches, initiates, and stops the robotic arm without complex interfaces.

Designed physical constraints and visual/auditory cues so the user felt safe interacting with moving hardware.
AI Integration & Feedback
Selected and tuned the ElevenLabs voice model to sound engaging and natural, matched the pacing of physical page turns.
Communicated the state of the robot (scanning the page, processing text, reading, turning) without breaking the magic of the storytelling experience.
Rapid Prototyping
Tested the interactions in real-time under extreme 48-hour constraints. We validated the timing of the mechanical page turn against the audio playback, ensuring the visual classification (distinguishing content from covers/blank pages) felt seamless to the user.
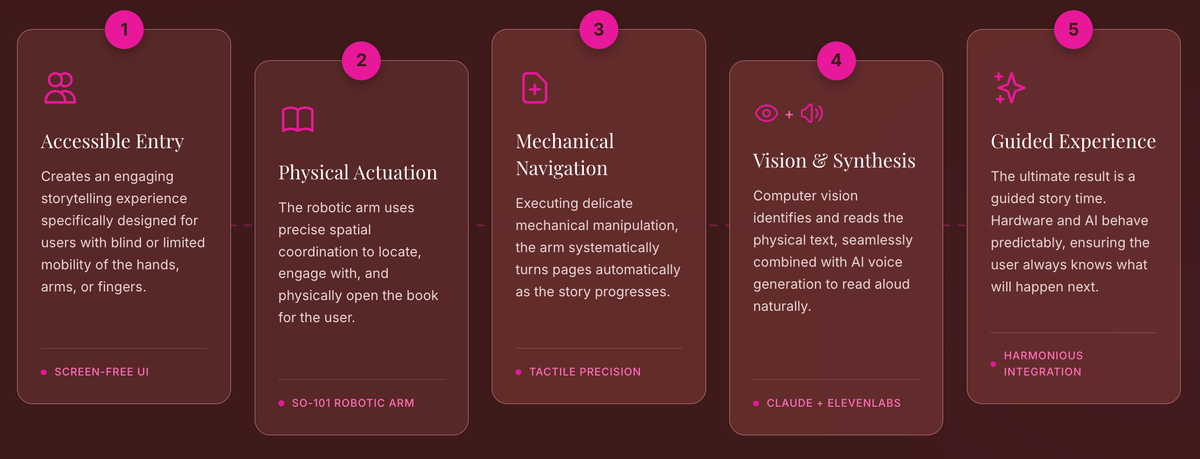
- Engaging storytelling experience for blind or limited mobility of the hands, arms or fingers.
- Opens the book

3. Turns pages

4. Reads aloud using computer vision and AI voice generation.

5. The result feels like a guided story time, where the hardware and AI behave predictably and the user always knows what will happen next.